研究室概要
情報駆動制御研究室(岩瀬研究室)では,システム制御を研究の軸に据え,これを土台として幅広い応用を視野に入れた研究をしています.
具体的なテーマとしては,不安定なモビリティの非線形制御,モデリングやその制御,人間のことを考えたセーフマニュアル制御,制御理論だけでなく、実機の設計・制作、センシングシステムの無線化などの関連分野に幅広く興味を持っています。
自転車班
自転車班では,「安全・安心・快適」な自転車の実現を目指し,姿勢の安定性や操縦性の向上に取り組んでいます.
自転車の手放し運転による旋回時の様子
無人走行の様子
自転車は免許が不要で手軽に利用できる一方,不安定になりやすい乗り物でもあります.特に低速走行時や,小さな子ども,高齢者,運転に不慣れな方が搭乗する場合や,
前カゴに荷物を載せたときにハンドルが操作しづらくなり怪我のリスクが高まります.そこで,操作技術や状況に関係なく安心して乗れる自転車を目指し,その姿勢安定性や走行特性について研究に取り組んでいます.
この実現のために,自転車モデルを用いたシミュレーションや,実機を使った検証を行いながらより良い自転車を探求しています.
ロボット班
ロボット班の中でも2つのグループ(ヘビ,農業)に分かれ,研究をしています.
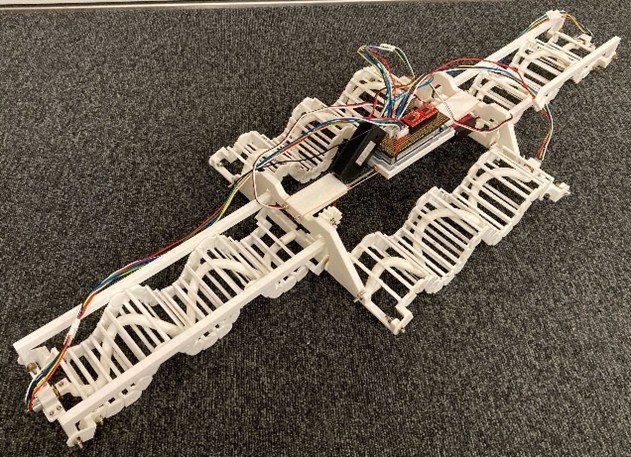
ヘビ型ロボットには脚や車輪がなく,波形を作り出して推進するのが特徴です.災害現場での捜索活動や,配管内での点検作業など様々な場所で活躍しています. ヘビ班では、天井裏やケーブルラック上を移動しながらケーブルを敷設するヘビ型ロボットを製作しており、今年(2025年)には実用可能な段階まで研究を進めることができました。現在は、ヘビ型ロボットがさらに活躍できる環境を模索しながら、柔軟な素材を用いたヘビ型ロボットの研究を行っています。 ヘビ班では,プログラミングや回路製作,3Dプリンタによる機体製作を一貫して行うため,ロボットを1から作り上げる経験ができます.ロボットに興味がある方は是非ヘビ班に!

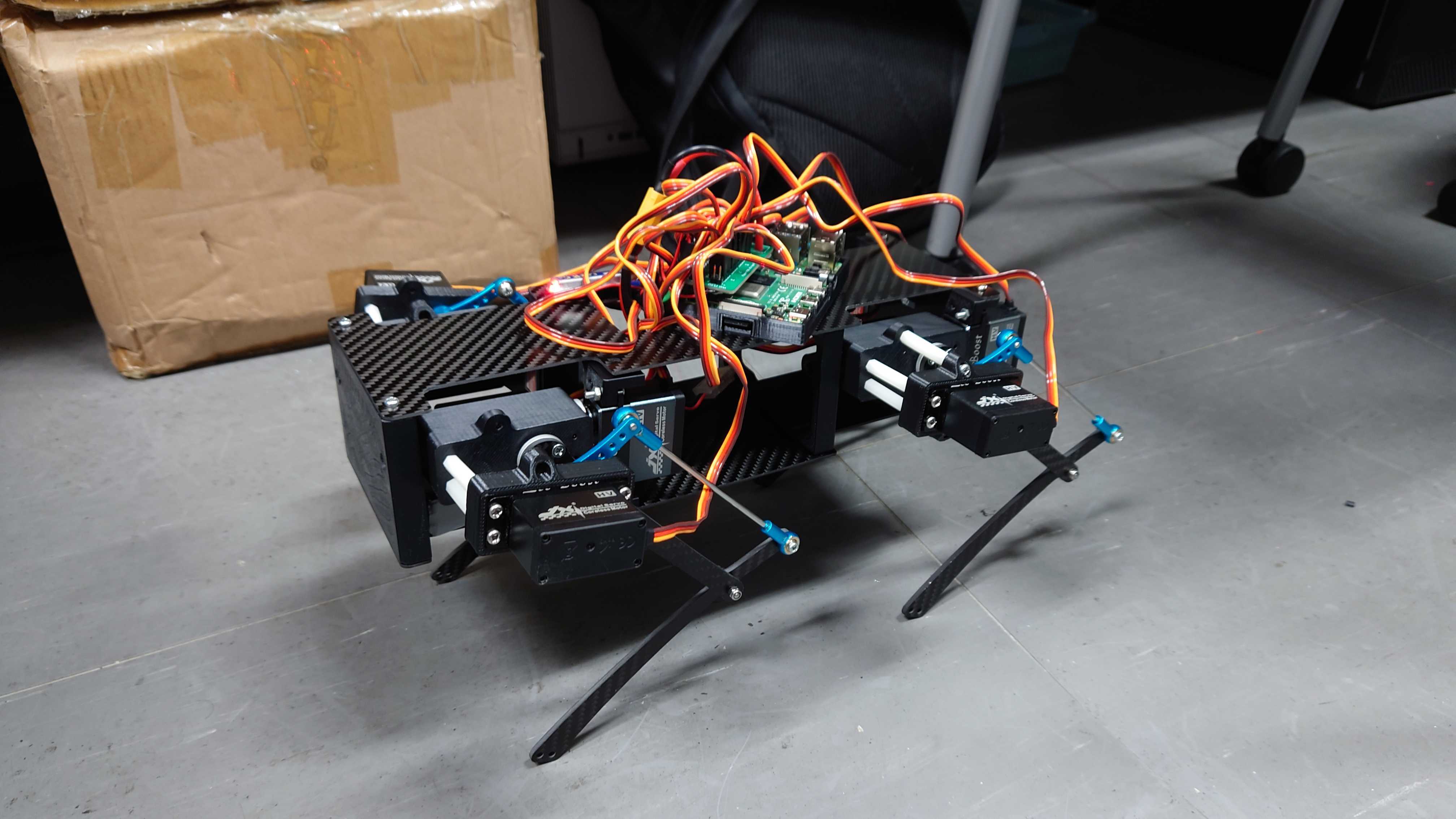
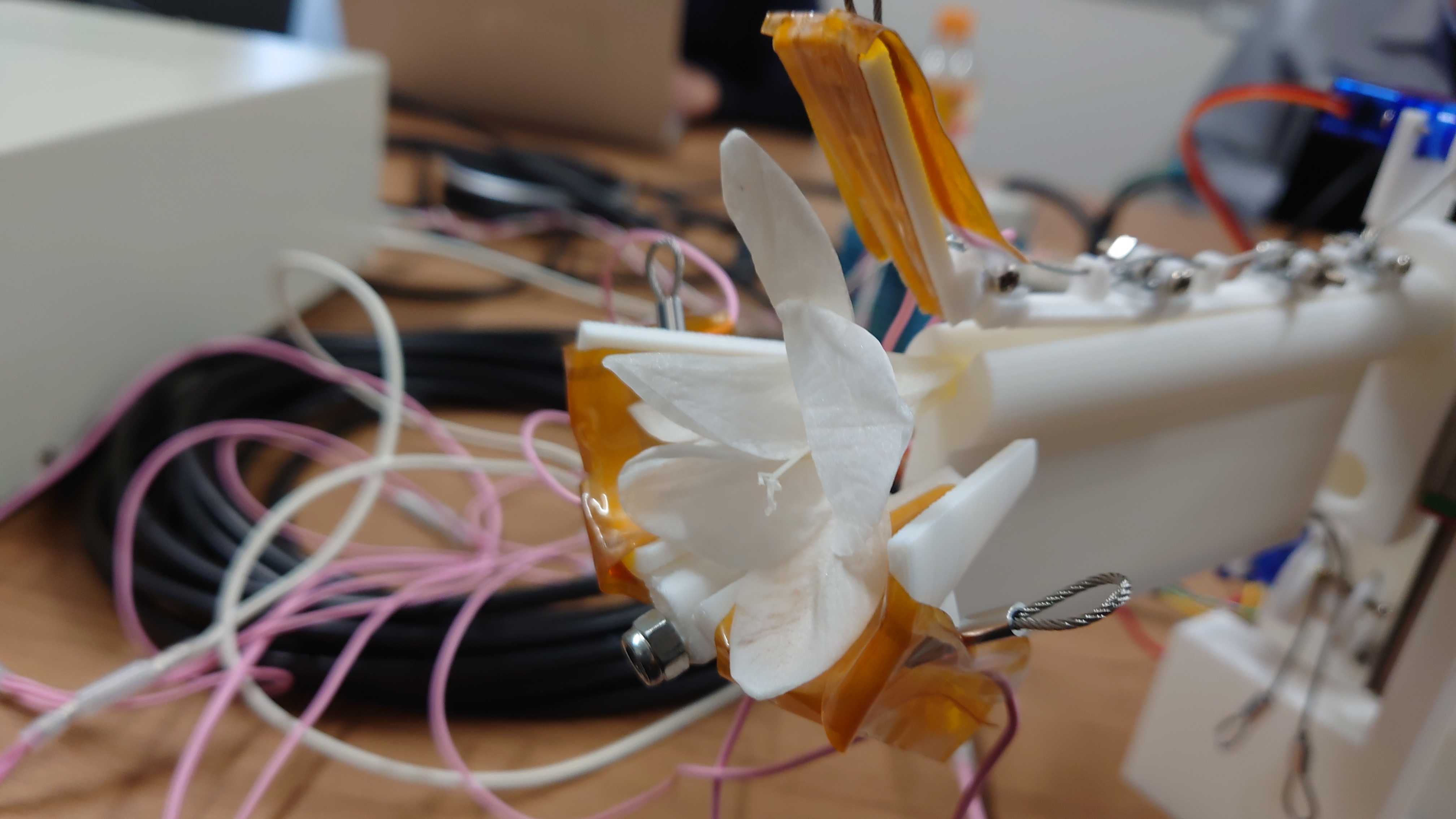
農業班では、人間に代わって農作業を行うロボットの開発に取り組んでいます。現在も自動化されていない農作業には重労働が多く求められています。 加えて、重労働というイメージから人材不足や高齢化が深刻化しており、これらの課題が問題視されています。 このような背景から農作業の自動化に関する研究がされていますが実用性に欠けるものがあり,より実用的な自動化ロボットが求められています. 現在は認知症改善の面で期待されているサフランの自動収穫に取り組んでいます.作業の自動化に興味のある方はぜひ岩瀬研究室にお越しください!
PMV班
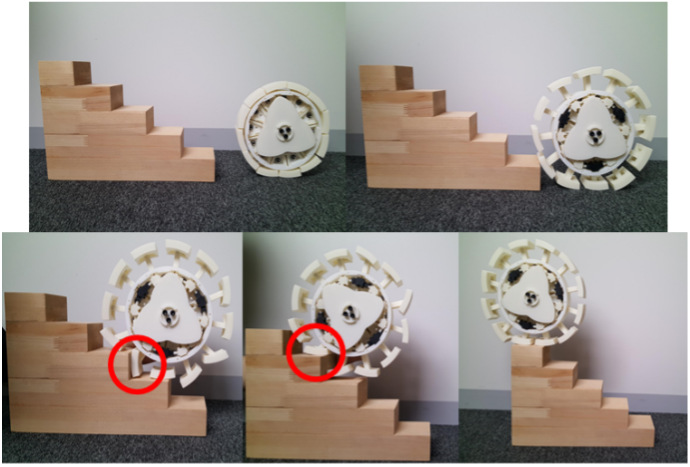
PMV班では,可変車輪や次世代の電動車いすの開発、制御をしています.そもそもPMVとはPersonal Mobility Vehicleの略で,一人または二人乗りの小型の移動機器になります. 本班では,2種の研究テーマがあります.車輪テーマでは,通常の車輪では踏破困難な段差や階段に適応するための変形車輪を開発しています. 車いす班では,階段昇降可能な電動車いすの開発に取り組んでいます.現状は4輪走行が実現できており,階段昇降動作の実現に向けて研究を進めています. PMVについて興味を持った方はぜひ岩瀬研究室へお越しください.

ヘリ班
ドローン班では、エンジンを動力とする森林調査用ドローンの開発に向けた研究をしています。
>
エンジンドローンにおける森林調査の様子
年間約70兆円の価値がある森林を発揮する為、林業従事者が森林に関する情報を正確に知り、その情報を活用することで、林業における最適生産計画を目指しています。
現在、森林に関する情報は人が現地に出向き計測している為、安全性(危険な場所での計測)や効率性(計測に時間がかかる)に問題があり、人に代わりドローンが計測作業を実施する事を考えています。
具体的には、ドローンが木々の間を安全に効率よく飛行する飛行制御の開発や木の情報を精度よく計測するシステムの開発などをしています。ドローンに興味がある人は、是非岩瀬研究室へ!
車両班
車両班では,小型車両などを用いた車両制御を主に研究しています.近年の自動運転技術の発展に伴い,自律走行車両の開発に着目しています. 皆様の身近な環境では,自動運転が現実的になりつつありますが,災害や農業など整備されていない環境での自動運転には課題があります. この課題解決のため,制御工学を軸に,障害物を回避する軌道生成や正確に軌道追従できる制御に取り組んでいます. F-REIというプロジェクトに参加しており,林業用機械の自動化,遠隔操作化を目指しています.

林業用機械(LV800)
USPM班
USPM班では,制御対象に対して望ましい動作を実現する「モーションコントロール」の手法について研究しています. 従来のモーションコントロールでは、制御対象ごとにコントローラを調整することで,最適な動作を実現してきました. しかし、制御対象となる製品の多様化に伴う調整の複雑化や、同じ型の製品であっても個別の調整が必要になるケースが増えています. これにより,社会実装の際に手間が生じるという課題があります. この課題を解決するため,私たちの研究室では,制御対象が変化しても適用可能な汎用的なコントローラの実現を目指し,研究を進めています.
筋電班
筋電班は,生体信号を用いたMMI(マン・マシン・インタフェース)について研究しています.特に生体信号のひとつである筋電位に着目し,人の動作意図(何をしようとしているか)を推定する手法に着手しています. 図例では腕に装着したセンサから利用者の筋電位信号を取得して,ロボットハンドを制御しています。 福祉分野では,上肢切断者(手や腕を事故などで失った人)などの障碍者が健常者と同じ様に生活できることを目的とした義手の開発がされています.その中でも筋電班は,筋電位で制御する筋電義手を応用先のひとつとして, 利用者が直感的に制御できるシステムを目指しています。
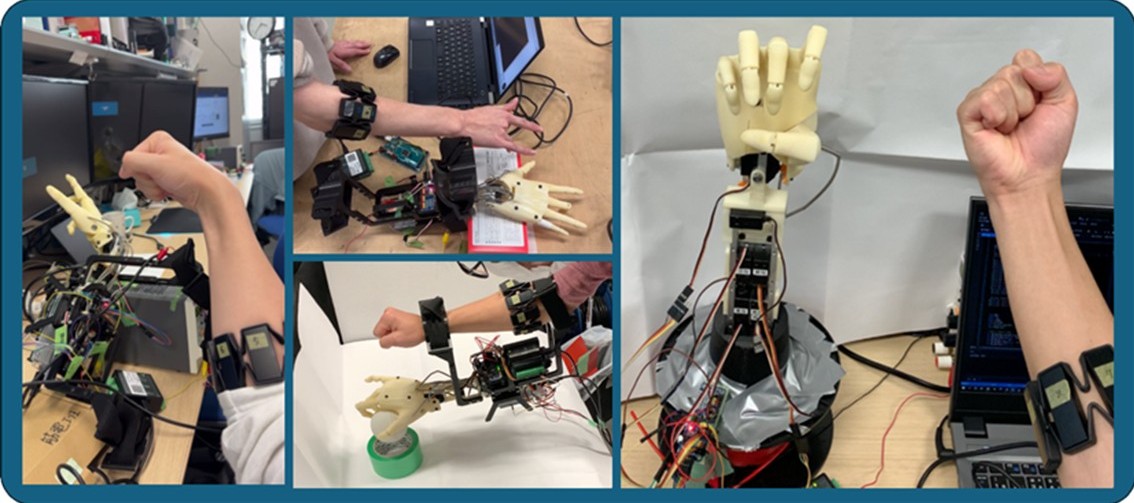
筋電医情報取得の様子
分数階班
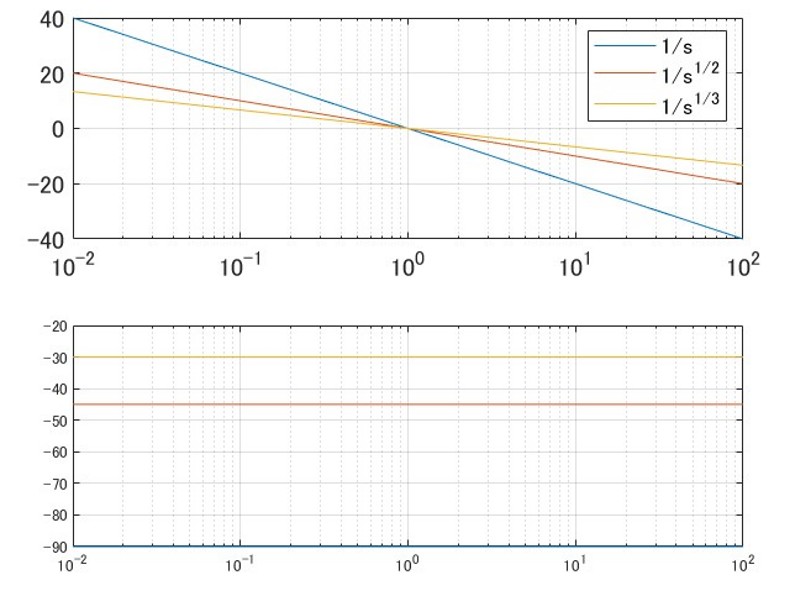
制御対象の数学モデルに基づく制御系設計法である現代制御理論やロバスト制御理論などのモデルベースト制御に対する需要が高まっています.システムを制御するにあたり、対象のモデルの精度は制御性能を左右します. しかし,未知のシステムのモデルを取得するにあたっては,非線形性や粘弾性のように,整数階微積分モデルでは近似的にしか表現できない場合を考慮する必要があります. 本研究班では、従来の整数次の微積分を1/2階などの非整数次微積分へ拡張させた分数次微積分を駆使し、数式モデルから最適なモデルを導出します。また、変化する環境や制御対象に適応する制御器を実現する適応制御に着目し、様々なアプローチで研究を進めています。 具体例として,振動抑制制御,群ロボットモデルへの応用を検討しています.
Overview of the Laboratory
The Information-Driven Control Laboratory (Iwase Lab) focuses on system control as its core research area, exploring a wide range of applications built upon this foundation. Specific research topics include nonlinear control of unstable mobility systems, modeling and control, safe manual control considering human factors, as well as related fields such as control theory, hardware design and development, and wireless sensing systems.
Bicycle
The Bicycle Team aims to realize a "safe, secure, and comfortable" bicycle by working to improve posture stability and maneuverability.
Turning behavior during hands-free bicycle riding
Unmanned driving
While bicycles can be used easily without a license, they are also prone to instability.
In particular, when riding at low speeds, or when the rider is a small child, an elderly person, or someone inexperienced, the risk of injury increases due to the difficulty in steering—especially when carrying items in the front basket.
Therefore, we are conducting research on posture stability and riding characteristics with the goal of developing a bicycle that can be ridden safely regardless of the rider's skill level or riding conditions.
To achieve this, we are exploring better bicycles through simulations using bicycle models and validation using actual bicycles.
Robotics
The robotics group is divided into two groups (snakes and agriculture).
Snake-like robots have neither legs nor wheels; instead, they propel themselves by generating wave-like motions. They are active in a variety of environments, such as search and rescue operations at disaster sites and inspection tasks inside pipes. The Snake Team has been developing a snake-like robot that moves through ceilings and cable racks while laying cables. This year (2025), we have progressed the research to a stage where it is practically usable. Currently, we are researching snake-like robots made with flexible materials while exploring environments where these robots can be further utilized. Since we handle programming, circuit creation, and 3D printing for building the robot from scratch, you will gain experience in constructing a robot from the ground up. If you're interested in robots, join the Snake Team!
The Agriculture Team is developing robots that can perform farming tasks in place of humans. Many agricultural tasks still remain unautomated and require physically demanding labor. In addition, due to the perception of farming as hard labor, the shortage of workers and the aging population are becoming more serious issues. Against this background, research on the automation of farming tasks is being conducted; however, some of the existing solutions lack practicality, and there is a growing demand for more practical automated robots. We are conducting research on the automated harvesting of saffron, which is expected to help improve symptoms of dementia. If you're interested in task automation, we encourage you to visit the Iwase Laboratory!
PMV
The PMV group develops and controls variable wheels and next-generation electric wheelchairs. PMV stands for Personal Mobility Vehicle, which is a small mobility device for one or two persons. There are two types of research themes in this group. In the Wheel Theme, we are developing transformable wheels designed to adapt to obstacles such as steps and uneven surfaces that are difficult to traverse with conventional wheels Here is the English translation of your sentence: The Wheelchair Team is working on the development of an electric wheelchair capable of climbing stairs. Currently, four-wheel driving has been achieved, and research is being conducted toward realizing the stair-climbing functionality. If you're interested in PMV, we encourage you to visit the Iwase Laboratory.
Vehicles
The Vehicle Group mainly researches vehicle control using small vehicles. With the recent advancements in autonomous driving technology, we are focusing on the development of self-driving vehicles. Autonomous driving is becoming more realistic in everyday environments, but there are still challenges when it comes to autonomous driving in undeveloped environments, such as during disasters or in agriculture. To solve this issues, thewe are focusing on control engineering, working on trajectory generation to avoid obstacles and control systems that can accurately follow the trajectory. We are participating in a project called F-REI, aiming to automate and enable remote operation of forestry machinery.
Forestry Machinery(LV800)
USPM
The USPM Team is conducting research on motion control techniques to achieve desired behaviors in controlled systems. In conventional motion control, optimal behavior has been achieved by tuning the controller for each controlled system. However, with the increasing diversity of control targets, controller tuning has become more complex, and cases requiring individual adjustment even for identical models are becoming more common. This issue creates challenges in practical implementation due to the increased need for manual adjustments. To solve this, our lab is working on developing a versatile controller that remains effective even when the control target varies.
EMG
The EMG Group conducts research on MMI (Man-Machine Interface) using biological signals. In particular, we focus on electromyographic signals, a type of biological signal, and are working on methods to estimate human motion intentions—what a person is trying to do. The diagram shows how electromyographic signals from a sensor attached to the user's arm are collected to control the robotic hand. In the field of welfare, the development of prosthetic hands aims to enable individuals with disabilities, such as those who have lost their hands or arms due to accidents, to live in the same way as able-bodied individuals. Among these efforts, the EMG Group focuses on developing electromyography-controlled prosthetic hands as one of the applications, with the goal of creating a system that can be intuitively controlled by the user.
The process of acquiring electromyographic (EMG) data
Fractional Derivative
There is a growing demand for model-based control methods, such as modern control theory and robust control theory, which are based on the mathematical models of the controlled systems. In controlling a system, the accuracy of the model of the target significantly influences the control performance. However, when obtaining the model of an unknown system, it is necessary to consider cases where phenomena such as nonlinearity or viscoelasticity can only be approximately represented by integer-order calculus models. In this research group, we focus on fractional calculus, which extends traditional integer-order calculus to non-integer orders such as 1/2, to derive optimal models from mathematical formulas. We are also concentrating on adaptive control, which adapts the controller to changing environments and control targets, and are advancing research through various approaches. As specific examples, we are considering applications in vibration suppression control and swarm-robot models.