研究室概要
情報駆動制御研究室(岩瀬研究室)では、システム制御を研究の軸に据え、これを土台として幅広い応用を視野に入れた研究を行っています。
具体的なテーマとしては、不安定なモビリティの非線形制御、エンジンモデリングやその制御、人間のことを考えたセーフマニュアル制御、制御理論だけでなく、実機の設計・制作、センシングシステムの無線化などの関連分野に幅広く興味を持っています。
研究班
情報駆動制御研究室(岩瀬研究室)は8つの研究班があります!!!
自転車班
自転車班では、安全、安心、快適な自転車の実現を目的とし、自転車の姿勢安定性や操縦性の向上を目指しています。
>
自転車の手放し運転による旋回時の様子
自転車は免許が必要なく安価で身近な乗り物です。一方で不安定な乗り物でもあるため、低速域における走行時や小さな子供や高齢者、乗車技術に自信がない利用者は転倒して怪我をしてしまうことがあります。
このため、操作能力によらずに誰でも快適に搭乗できる自転車の実現を目指し、自転車の姿勢安定性や特性について研究しています。
これを実現するために、自転車モデルを用いたシミュレーションや実機を使った検証をしています。岩瀬研究室では自転車の研究を通して幅広い分野のことが学べます。
ヘビ班
蛇班では、蛇型ロボットの制御を研究しています。

Z-Cobraの周囲観察動作

Z-Cobra
蛇型ロボットは脚がなく細長い機体が特徴で、災害現場や工場の配管内の点検などで活躍しています。
現在蛇班では電気工事会社と合同研究しており、天井裏やケーブルラック上を移動しながらケーブルを牽引する蛇型ロボットの実用化に向けて日々取り組んでいます。
蛇型ロボットの動き方、機体設計、無線化といった様々な方面で研究しています。数ヶ月に1度企業向けにプレゼンをしたり、展示会等に出展したり、他の研究班では味わえない経験ができます。
企業合同研究を経験したい方、蛇型ロボットに興味がある方は是非蛇班に!
天井開口班
天井開口班では、電気工事関係の企業との共同研究で照明設備設置の際に天井に穴を開ける天井開口作業を代替するロボットの開発に取り組んでいます。

開発中の天井開口ロボット
>
ロボットは全体を移動させる移動台車、天井面に対して切削をする天井作業部、それらをつないで天井作業部を昇降させる装置から構成されています。
ロボットの機構は外注して製作してもらい、実際の源氏で実験を行うため、現場で活躍するロボットを本格的に制御できます。現場で活躍するロボット制御をやってみたい方はぜひ岩瀬研におこしください!
ドローン班
ドローン班では、エンジンを動力とする森林調査用ドローンの開発に向けた研究をしています。
>
エンジンドローンにおける森林調査の様子
年間約70兆円の価値がある森林を発揮する為、林業従事者が森林に関する情報を正確に知り、その情報を活用することで、林業における最適生産計画を目指しています。
現在、森林に関する情報は人が現地に出向き計測している為、安全性(危険な場所での計測)や効率性(計測に時間がかかる)に問題があり、人に代わりドローンが計測作業を実施する事を考えています。
具体的には、ドローンが木々の間を安全に効率よく飛行する飛行制御の開発や木の情報を精度よく計測するシステムの開発などをしています。ドローンに興味がある人は、是非岩瀬研究室へ!
PMV班
PMV班では、可変車輪や次世代の電動車いすの開発、制御をしています。
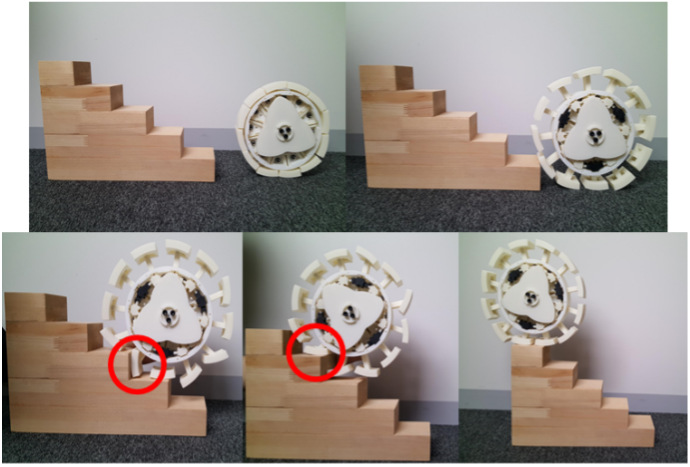
変形車輪の階段踏破時の様子

開発中の電動車いす
>
PMVとはPersonal Mobility Vehicleの略で、一人または二人乗りの小型の移動機器になります。
PMV班では、3種の研究テーマがあります。車輪テーマでは、通常の車輪では踏破困難な段差や階段に適応するための車輪の開発をしています。
PMV班では、セグウェイと呼ばれる2輪倒立振子の安定化制御について取り組んでいます。車いす班では、片手のみで車いすの走行が可能な車いすの開発や倒立走行やロボットアームによってドアの操作が可能な次世代の電動車いすの開発に取り組んでいます。
PMVについて興味を持った方はぜひ岩瀬研究室へお越しください。
車両班
車両班では、小型車両などを用いた車両制御を主に研究しています。
>
土壌水分測定用車両
近年の自動運転技術の発展に伴い、自律走行車両の開発に着目しています。皆様の身近な環境では、自動運転が現実的になりつつありますが、災害や農業など整備されていない環境での自動運転には課題があります。
この課題解決のため、制御工学を軸に、障害物を回避する軌道生成や正確に軌道追従できる制御に取り組んでいます。また、車両制御を応用し、羊を誘導する牧羊犬を再現するロボット開発など、動物の群をコントロールする研究にも取り組んでいます。
岩瀬研究室では車両だけでなく、様々な分野に応用が効く制御理論を学べますので、幅広く興味のある方は是非お越しください!
エネルギー班
エネルギー班では、リチウムイオン電池(LIB)の状態推定をはじめとした理論ベースの制御をしています。
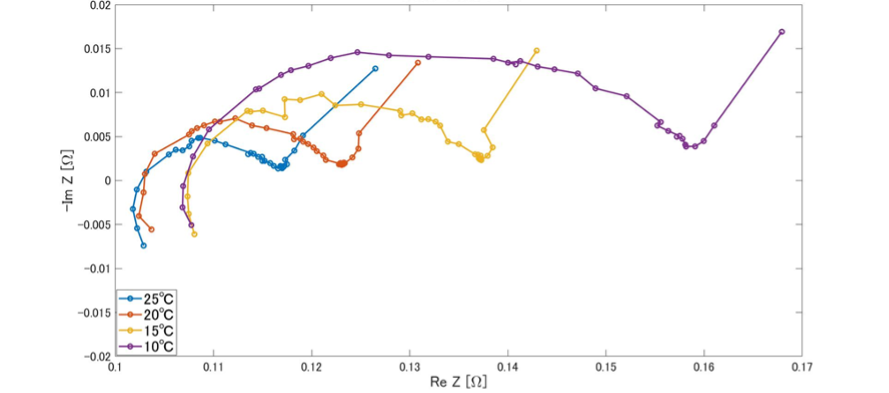
4温度でのCole-Cole Plot
LIBはスマートフォンや電気自動車など広く使われている一方で事故も多いものとなっています。そのため、電池の状態を把握することが重要です。
電池の研究と聞くと化学や材料などの研究と思う人もいるかもしれませんが、数学を基にした制御の知識を用いて、最適な電池の運用法の検討に取り組んでいます。
現在は、微積分を拡張した計算法を用いたLIBのシミュレーション法の確立や環境温度の変化を考慮した劣化具合の推定に取り組んでいます。
筋電班
筋電班は、生体信号を用いたMMI(マン・マシン・インタフェース)について研究しています。
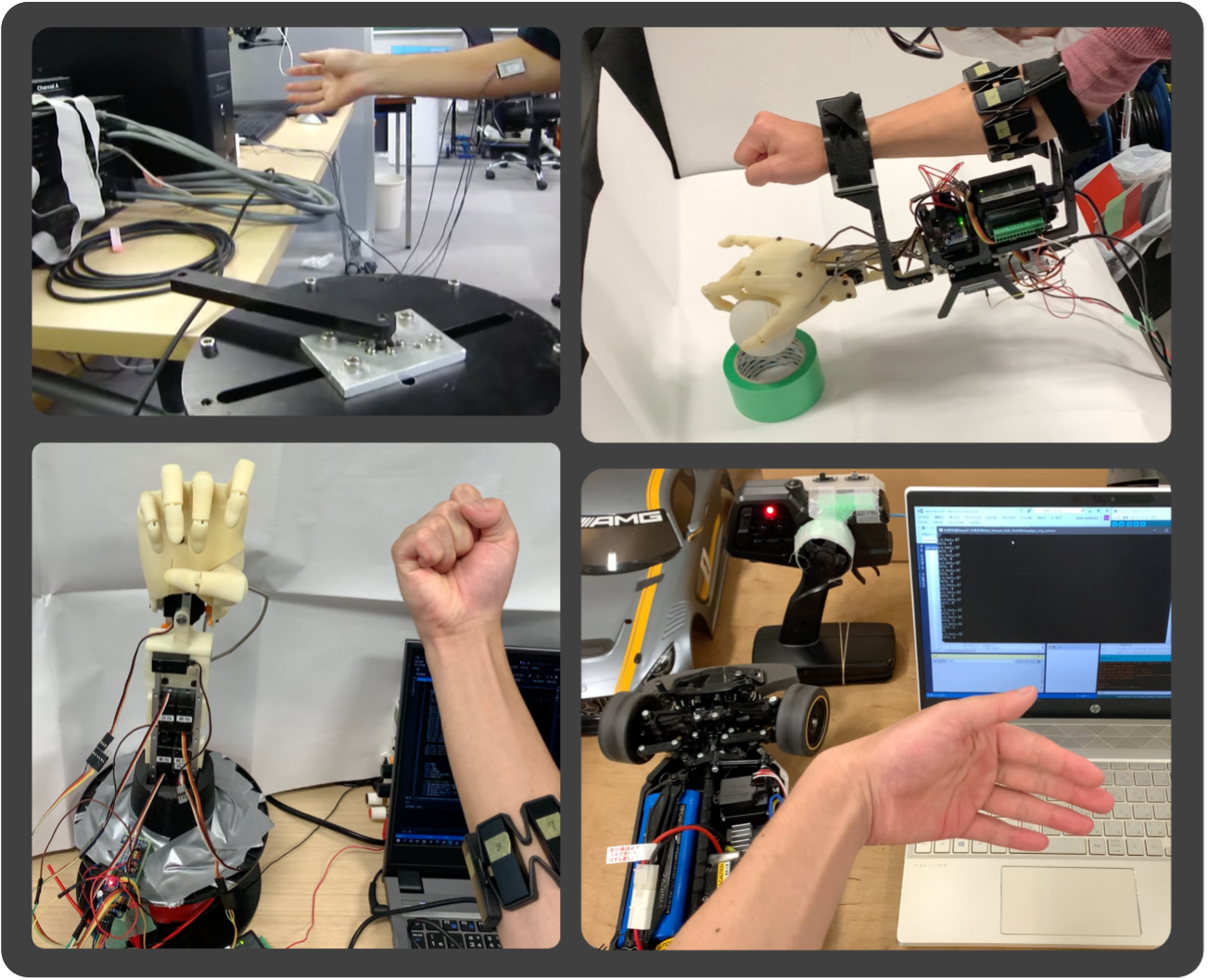
筋電位情報取得の様子
>
特に生体信号の筋電位に着目して、人の動作意図を推定する手法や応用先について研究しています。
図は腕に装着したセンサから利用者の動作意図(何をしようとしているか)を取得し、ラジコンやロボットハンドを制御しています。
福祉分野では、上肢切断者(手や腕を事故などで失った人)などの障碍者が健常者と同じ様に生活出来ることを目的とした義手の開発があります。
義手に関する研究では筋電位信号を利用することで、利用者が直感的に義手を扱えること目的にしています。
また、仮想空間への応用についても研究しています。仮想空間とは、昨今メタバースとして注目されているAR・VR・MRといった仮想空間(仮想現実)に対して、筋電位信号を用いたマン・マシン・インタフェースを利用する研究です。
仮想空間にマン・マシン・インタフェースを応用することで、これまでは現実世界の空間内、仮想空間の空間内に限られていた環境を相互に活用することが出来るようになります。
さらに、筋電信号を用いて個人を認識する研究もしています。
個人を特定することで個人に合わせたサービスの提供が可能となります。個人に合わせたサービスは今後ますます需要が高まっております。個人認識には畳み込みニューラルネットワーク(CNN)を始めとした機械学習を利用しています。